Skakun inspiracją dla projektu robo-pająka o wielkości 1 milimetra
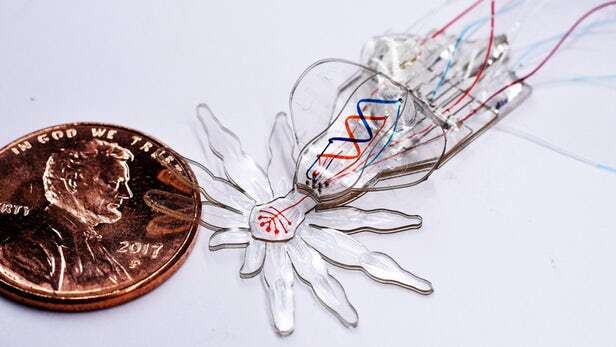
Zespół badaczy z Harvardu opracował metodę tworzenia niewielkich, przyjemnych w dotyku pająków (wzorowanych na skakunach), które poruszają się dzięki tzw. układowi mikroprzepływowemu. To nie pierwszy raz, kiedy naukowcy inspirowali się przyrodą podczas tworzenia maszyn. Co więcej, nie jest to nawet pierwszy przypadek, kiedy wzorem było zwierzę o ośmiu kończynach, bowiem ludzie związani z tym samym uniwersytetem dwa lata wcześniej pokazali Octobota – mechaniczną ośmiornicę. Z pewnością jednak ich najnowszy projekt wyróżnia się pod innym względem – sztuczny pająk ma wielkość … Czytaj dalej Skakun inspiracją dla projektu robo-pająka o wielkości 1 milimetra
0 komentarzy