Zespół badaczy z Harvardu opracował metodę tworzenia niewielkich, przyjemnych w dotyku pająków (wzorowanych na skakunach), które poruszają się dzięki tzw. układowi mikroprzepływowemu.
To nie pierwszy raz, kiedy naukowcy inspirowali się przyrodą podczas tworzenia maszyn. Co więcej, nie jest to nawet pierwszy przypadek, kiedy wzorem było zwierzę o ośmiu kończynach, bowiem ludzie związani z tym samym uniwersytetem dwa lata wcześniej pokazali Octobota – mechaniczną ośmiornicę. Z pewnością jednak ich najnowszy projekt wyróżnia się pod innym względem – sztuczny pająk ma wielkość ok. jednego milimetra.
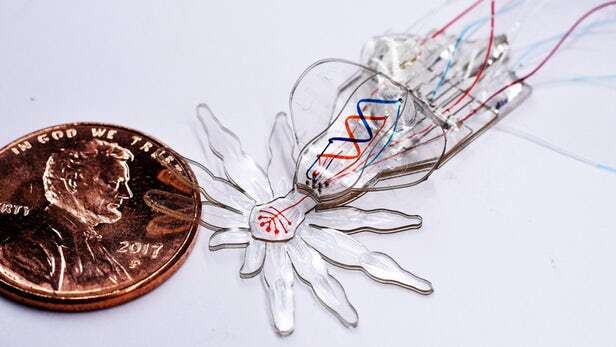
Urządzenie jest napędzane chemicznie. W jego wnętrzu znajduje się system rurek, przez które przepływa ciecz, wprawiając robo-pająka w ruch czy też zmieniając jego barwę. Całość ma hybrydowy charakter, a korpus został wykonany z silikonowej gumy. Składa się ona z dwunastu warstw nałożonych przy pomocy lasera i połączonych w celu nadania pająkowi trójwymiarowych kształtów.
Znajdujące się wewnątrz kanały mikrofluidowe utworzono przy pomocy wysokiego ciśnienia i żywicy, którą utwardzono przy pomocy światła UV. Kolejnym krokiem było „pokolorowanie” pająka, aby upodobnić go do prawdziwego skakuna (będącego, swoją drogą, niezwykle uroczym zwierzakiem). Gdy ciecz przepływa przez stworzone uprzednio kanały, robo-pająk sprawia wrażenie żywej istoty, choć w rzeczywistości nie porusza się w samodzielny sposób.
Autorzy projektu przyznają, że na tę chwilę nie ma on żadnego praktycznego zastosowania, lecz jest to pokaz możliwości technologii MORPH, która może okazać się przydatna np. w medycynie ze względu na niewielkie rozmiary urządzenia.
[Źródło: newatlas.com; grafika: Harvard University]
