
Gekon skacząc np. z jednej gałęzi na drzewo, wygląda tak, jakby „szukał guza”. Jednak w rzeczywistości moment, w którym te gady uderzają głową w pień, jest dla nich kluczowy w utrzymywaniu się drzew, dlatego na podstawie ich ruchów naukowcy stworzyli nowego zwinnego robota.
Odpowiedź na to, jak lądują gekony, może przynieść poprawę na poletku innych robotów
Zespół obejmował czterech specjalistów, których wspólny wysiłek doczekał się publikacji w dzienniku Communications Biology. Najpierw jeden z nich nakręcił i przeanalizował w zwolnionym tempie wiele filmów, na których gatunek Hemidactylus platyurus, czyli gekon azjatycki z płaskim ogonem skacze z pnia na pień.
Czytaj też: Szybkie prawie jak światło. Nowe satelity Starlink od SpaceX skorzystają z laserów
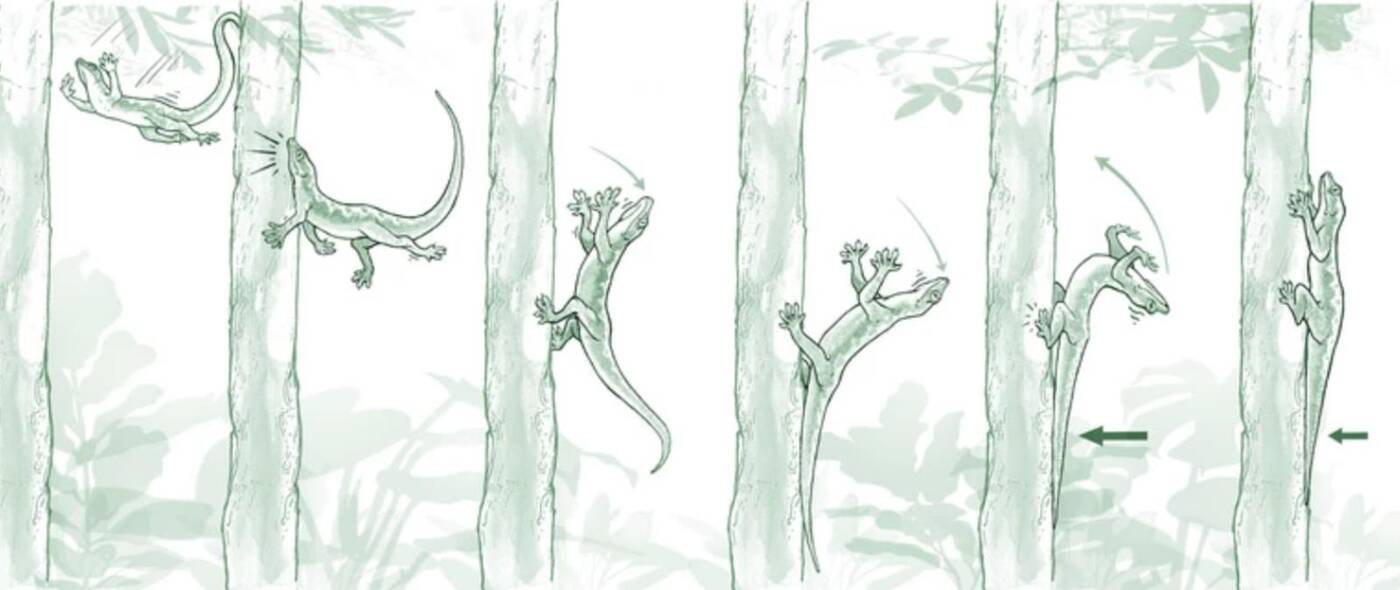
Chociaż zwierzęta starały się zwykle unikać lądowań, w których pierwsze uderzenie przyjmowała ich głowa, robiły to zawsze, kiedy osiągały w powietrzu prędkość około 6 metrów na sekundę. Wtedy schemat zawsze był identyczny – ich górna część korpusu odbijała się od drzewa, przez co trzymały się pnia wyłącznie tylnymi łapkami… i ogonem, którego do pnia przyciskał spowodowany uderzeniem impet. Dzięki niemu gekon finalnie nie spadał.
Czytaj też: Półautomatyczne roboty Kiwibot radzą sobie świetnie z dostarczaniem jedzenia
Naukowcy odtworzyli dokładnie ten sam mechanizm w autorskim „robotycznym gekonie”, czyli wydrukowanym w 3D „miękkim robocie”. Wyposażyli go w cztery stopy pokryte rzepem, ogon i wewnętrzne zmotoryzowane ścięgno, które było automatycznie uruchamiane w celu dociśnięcia ogona, gdy przednie nogi uderzały w powierzchnię symulowanego pnia.
Wspomniane rzepy na łapkach miały w przypadku tego robota kluczowe znaczenie, bo wystrzeliwano go we fragment pokryty filcem, co imitowało naturalną przyczepność łapek gekonów. Jednak te nie wystarczały, żeby utrzymał się na drzewie, bo po usunięciu ogona wskaźnik udanych skoków z 55% spadł do 15%, podczas gdy w naturalnym środowisku skuteczność 87%. Wnioski? Oddajmy głos jednemu z naukowców:
Czytaj też: Największy helikopter na świecie był kompletnie bezużyteczny, czyli o Mi-12
Dzięki robotowi byliśmy w stanie zmierzyć coś, czego nie mogliśmy zmierzyć z wykorzystaniem gekonów w terenie. Siły reakcji ścian podczas uderzenia po lądowaniu potwierdziły, że ogon jest istotną częścią ułatwiającą lądowanie […]. Nasz miękki robot […] może również pomóc poprawić lokomocję [innych – dop. red] robotów poprzez zwiększenie [ich] fizycznych możliwości i uproszczenie sterowania.
– tłumaczy Dr. Ardian Jusufi z Max Planck Research School for Intelligent Systems.
