Zręczność związana z manipulowaniem różnego rodzaju przedmiotami z pewnością nie jest najmocniejszą stroną robotów. Przełom w tej sprawie może nastąpić dzięki naukowcom z laboratorium CSAIL należącego do MIT.
To właśnie oni stworzyli układ będący w stanie obrócić ponad dwa tysiące różnych obiektów. Taka możliwość, obejmująca bardzo zróżnicowane przedmioty, pomaga robotycznej ręce w szybkim wybieraniu i umieszczaniu obiektów w określonych miejscach i w określony sposób. Rozwiązanie proponowane przez przedstawicieli MIT mogłoby być szczególnie przydatne w logistyce i produkcji, na przykład ułatwiając pakowanie produktów.
Czytaj też: Jeśli boicie się igieł, to ten robot z pewnością Was zainteresuje
W przemyśle najczęściej stosuje się chwytak szczękowy o równoległym ruchu, częściowo ze względu na prostotę sterowania, jednak fizycznie nie jest on w stanie obsłużyć wielu narzędzi, których używamy w życiu codziennym. Nawet wykorzystywanie szczypiec jest trudne, ponieważ nie można sprawnie poruszać jednym uchwytem w tę i z powrotem. Nasz układ pozwoli wielopalczastej ręce sprawnie operować takimi narzędziami, co stwarza nowy obszar dla zastosowań w robotyce.
Tao Chen, CSAIL
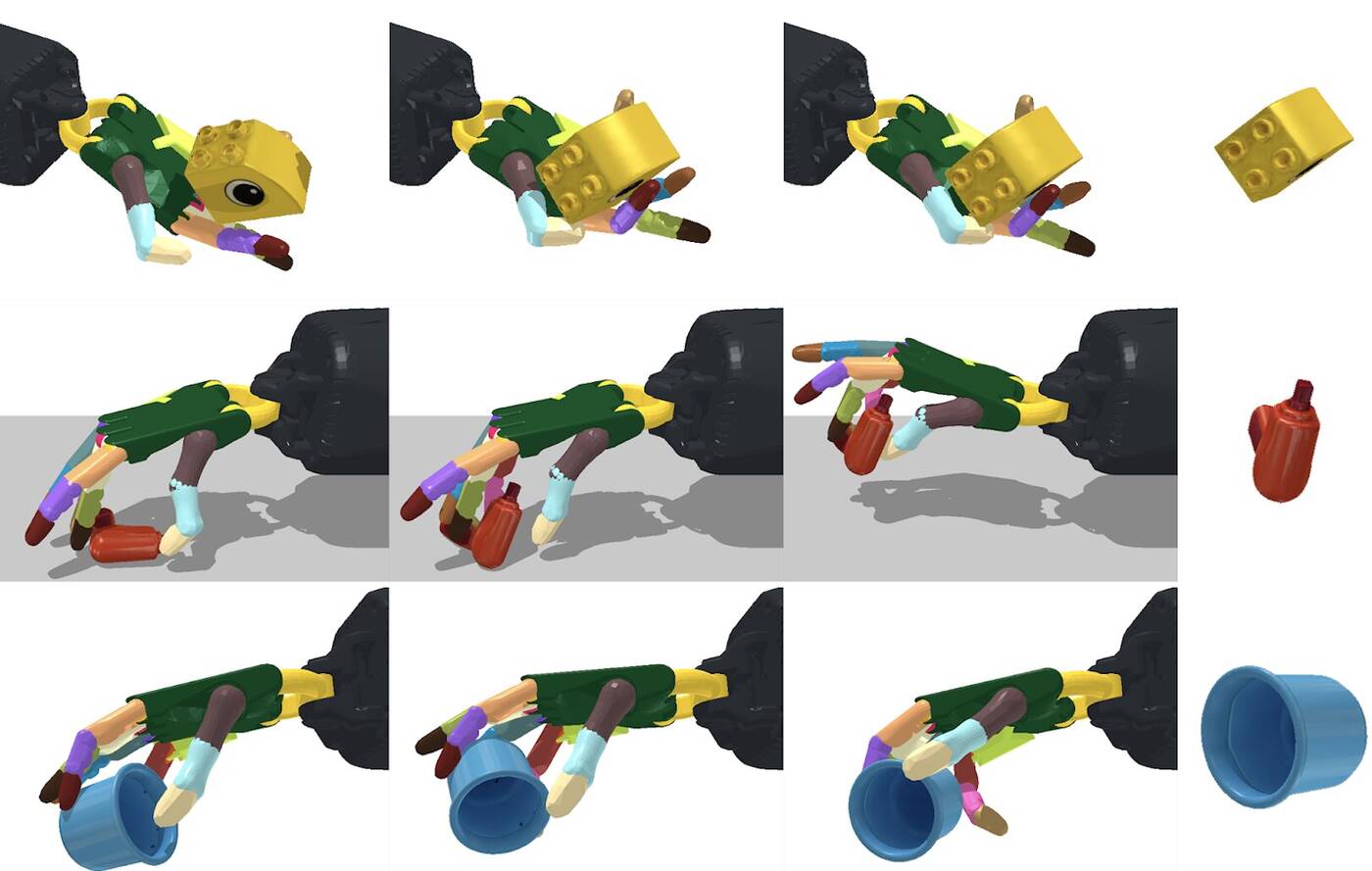
Robotyczna dłoń szczególnie dobrze radzi sobie z okrągłymi, niewielkimi obiektami
Jakby problemów nie było wystarczająco dużo, to wraz ze skierowaniem robotycznej dłoni w dół pojawił się kolejny: konieczność walki z grawitacją. Okazało się jednak, że wykorzystanie algorytmu opartego na uczeniu przez wzmacnianie, głębokiego uczenia i metody szkolenia typu „nauczyciel-uczeń”, przyniosło oczekiwane rezultaty. Z kolei żeby rozwiązać problem grawitacji, naukowcy najpierw uczyli robota nowych umiejętności w środowisku o zerowej grawitacji. Później dostosowywali kontroler do warunków związanych z ziemską grawitacją.
Czytaj też: Kroczy po dnie i zbiera ważne dane w całkowitej izolacji. Robot Benthic Rover II dokonał już wiele
Efekty okazały się naprawdę niezłe, ponieważ robot szczególnie dobrze radził sobie z niewielkimi, okrągłymi obiektami, takimi jak jabłko czy piłka do tenisa ziemnego. W ich przypadku skuteczności manipulowania była blisko 100 procentom. W przypadku przedmiotów o bardziej nieregularnych kształtach, takich jak łyżka czy śrubokręt, efektywność była natomiast najmniej imponująca i wyniosła około 30 procent.
