
Naukowcy z Laboratorium Informatyki i Sztucznej Inteligencji MIT (CSAIL) opracowali wszechstronną nową robotyczną maszynę, która może samodzielnie nauczyć się podnosić i odkładać wszelkiego rodzaju rzeczy. Nawet tych, których nigdy wcześniej nie miał okazji spotkać na swojej drodze robotycznych swawoli.
Na ten moment będąc ludźmi mamy jedną najważniejszą przewagę nad robotami – możemy organoleptycznie ocenić jakikolwiek nigdy wcześniej niespotkany przedmiot, rozważając np. jego przeznaczenie. Roboty bazują z kolei głównie na algorytmach, więc są dobre w wykonywaniu jasno określonych wcześniej zadań w kółko. Przykładem niech będzie robotyczne ramię przenoszące kwadratowe elementy. Wystarczy, że podmienimy je na jakieś owalne i… ktoś tutaj nie będzie w stanie sobie poradzić z nowym wyzwaniem.
Prace wspomnianych naukowców odzwierciedlają podobne projekty badawcze, które mają na celu zbudowanie robotów, mogących delikatnie obsługiwać szereg obiektów. Należą do nich konwencjonalnie ukształtowane miękkie chwytaki robota, czy bardziej niekonwencjonalne wzory. Zespół CSAIL twierdzi jednak, że typowe roboty chwytaki polegają głównie na szacowaniu pozycji i orientacji obiektu, wykorzystując algorytmy oparte w dużej mierze na geometrii, aby je złapać. Ich zdaniem jest to pewne ograniczenie, zwłaszcza przy chwytaniu przedmiotów o bardzo różnych kształtach i próbach ich ponownego odłożenia z jakąkolwiek delikatnością.
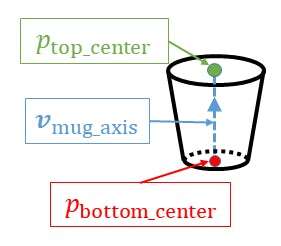
Zdecydowali się więc w swoim oprogramowaniu sterującym Keypoint Affordance Manipulation (KPAM) na narzucanie zestawu kluczowych punktów na obiekcie, który system napędzający robota sam interpretuje, jako współrzędne. Przykładowo system określa kubek trzema punktami, które pozwolą mu na manipulowanie nim po chwycie. Testy obejmowały też przenoszenie ponad 20 par butów i choć napotkano pewne problemy z próbą odebrania pary z wysokimi obcasami, to wystarczyło dorzucić do danych kilka innych par, aby robot zakończył zadanie z powodzeniem.
Czytaj też: To robotyczne ramię niezwykle precyzyjnie operuje przedmiotami
Źródło: New Atlas
