Czerpiąc trochę inspiracji ze świata ślimaków i mieszając niektóre współczesne podejścia robotyki, naukowcy z University of Bristol stworzyli coś ciekawego.
Mowa o robocie ElectroSkin, czyli miękkim, elastycznym robocie, którego można schować do kieszeni i który może sam z siebie pokonywać trudne powierzchnie. Tak trudne, jak nachylone ściany i dlatego właśnie naukowcy wyobrażają sobie go, jako podstawę do przyszłych robotów, mogących podbijać niebezpieczne obszary, czy po prostu czyścić np. szyby ogromnych wieżowców.
Same w sobie miękkie roboty, czyli takie, które nie posiadają elementów, których nie można wygiąć, niosą za sobą ogrom obietnic. Zwłaszcza te, w ramach których mogą używać swojej formy do chwytania powierzchni i delikatnych przedmiotów. Roboty tego typu często robią to poprzez elektro-adhezję, polegającą na siłach elektrostatycznych. Dzięki nim mogą osadzać się na pochylonych powierzchniach, podnosić przedmioty lub właśnie wspinać się po ścianach.
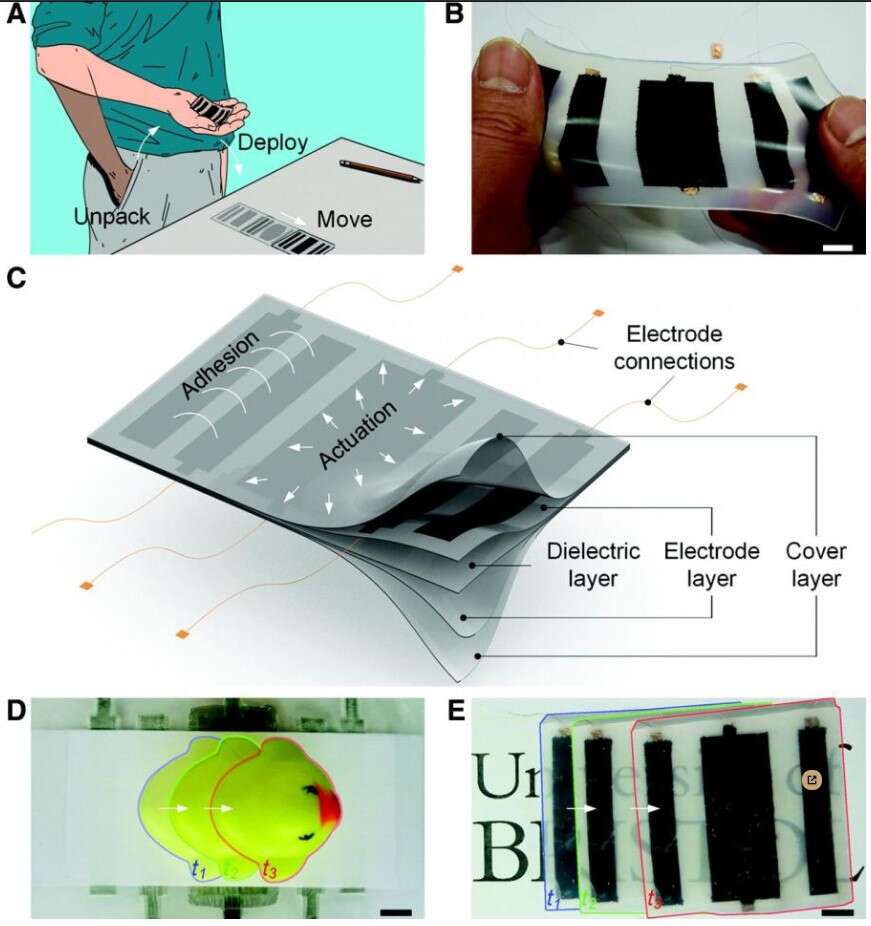
ElectroSkin stosuje tę samą technikę, ale zespół twierdzi, że jako pierwszy łączy tę umiejętność z poruszaniem się. Podobnie jak ślimak, ten robot rozszerza się i kurczy, aby pokonywać odległość – stąd zresztą obecność sztucznych mięśni. Ze względu na swoją elastyczną naturę ElectroSkin można zwinąć i włożyć do kieszeni, a następnie wyciągnąć i rzucić na powierzchnię, aby zabrał się do pracy. Jak opisuje lider zespołu, Jonathan Rossiter:
ElectroSkin jest ważnym krokiem w kierunku miękkich robotów, które można łatwo transportować, rozmieszczać, a nawet nosić. Połączenie elektrycznych sztucznych mięśni i elektrycznego chwytania odtworzyło ruchy zwierząt, takich jak ślimaki, a gdzie te nie mogą dotrzeć!
