
Były już robotyczne ryby walczące z gatunkami inwazyjnymi, więc dlaczego by nie pójść dalej i spróbować odtworzyć tuńczyka w formie roboryby Tunabot? Wszystko oczywiście po to, aby opracować nowe i ulepszone formy podwodnego napędu, kopiując jedną z najszybszych ryb w morzu.
Czytaj też: Podwodny robot namierzył tajemniczą meduzę
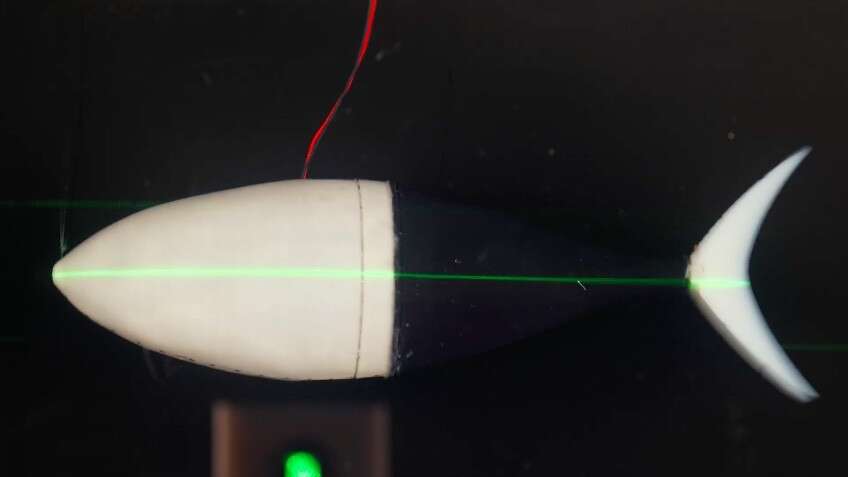
Powstały dzięki współpracy inżynierów mechaników z University of Virginia i Harvard University Tunabot jest bezpośrednio związany z tuńczykiem żółtopłetwym oraz związaną z nim makrelą atlantycką. Chociaż zamiast dwóch metrów ma zaledwie 25,5 centymetrów, to i tak radzi sobie w wodzie tak dobrze, że prędkością dorównuje prawdziwemu tuńczykowi w odpowiedniej skali. Pokonuje więc około czterech długości ciała na sekundę.

Dokonuje tego tak, jak „oryginał” szybko zginając swoje elastyczne ciało w sposób podobny do żywego tuńczyka. Testy sugerują, że jeśli Tunabot jest wyposażony w 10-watowy akumulator, może w ten sposób pływać z prędkością 0,4 m/s na dystansie około 9 km. Gdyby prędkość zwiększono do 1 m/s, zasięg spadłby do około 4 km.
Badania Tunabot mogą ogólnie prowadzić do szybszych i bardziej wydajnych systemów napędowych zarówno dla załogowych, jak i bezzałogowych tworów podwodnych. W rzeczywistości naukowcy planują ostatecznie wyprodukować system, który przewyższa rzeczywistego tuńczyka.
Czytaj też: Naukowcy budują mikroskopijne biohybrydowe roboty
Źródło: New Atlas
