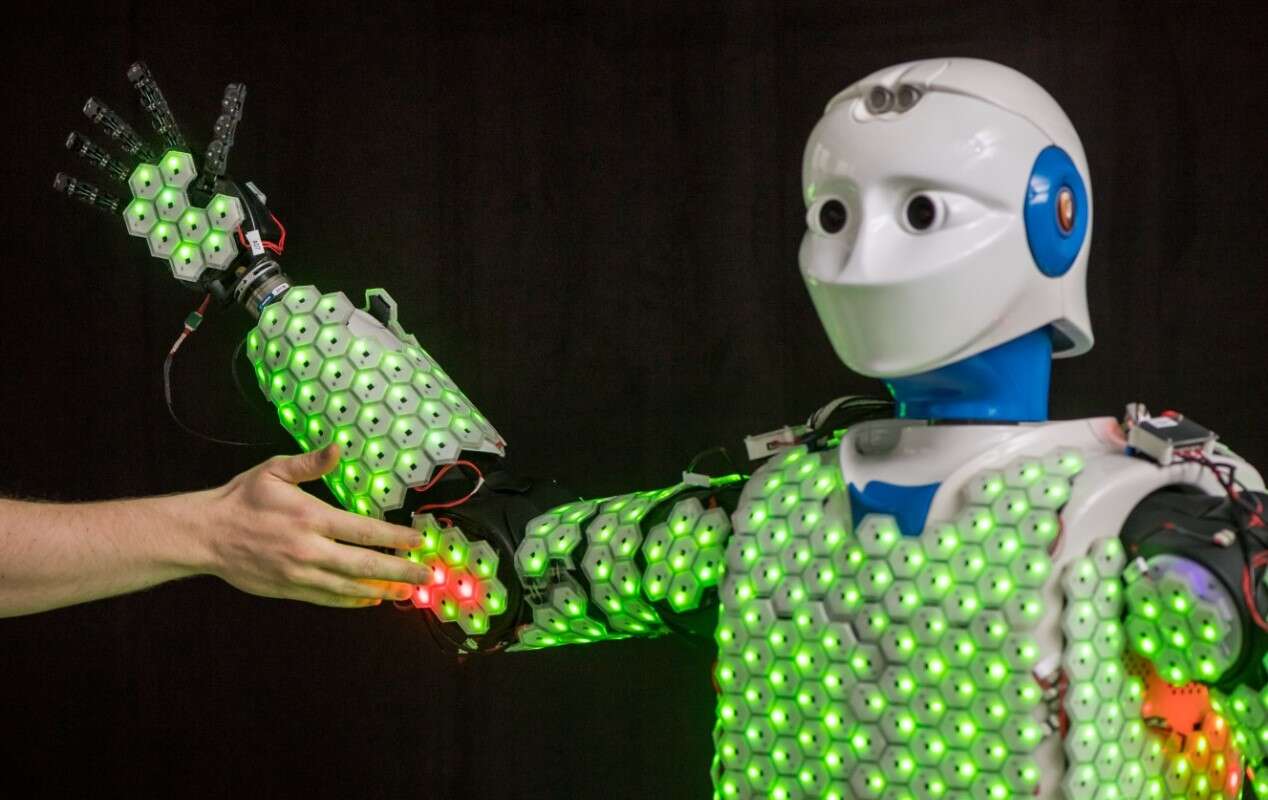
Mamy okazję rzucić okiem na idealny przykład tego, że niektóre technologie po hucznym ogłoszeniu nie przepadają w zapomnienie. O systemie sztucznej skóry słyszeliśmy bowiem w 2011 roku i dopiero teraz doczekaliśmy się stworzonego na ich podstawie autonomicznego robota humanoidalnego (H-1), który przybrał sztuczną skórę ze zmysłem dotyku.
Czytaj też: Irańskie roboty naziemne Heidar-1 są zabójcze dla czołgów
W ciągu ośmiu lat od powstania oryginalnego robota profesor Gordon Cheng i jego zespół z Uniwersytetu Technicznego w Monachium (TUM) udoskonalili wygląd poszczególnych ogniw czujnikowych z zachowaniem ich podstawowych funkcji. Nadal mają jednak kształt sześciokąta, co pozwala na umieszczenie ich w strukturze plastra miodu i nadal mogą mierzyć siłę dotyku, ciśnienie, temperaturę i przyspieszenie.

Jednak największym pokonanym przeciwieństwem było stworzenie systemu, który zapewniłby odpowiednią moc obliczeniową do 1260 czujników. W okiełznaniu tego zespół zainspirował się podejściem stosowanym przez ludzki układ nerwowy i zamiast stale informować o każdym wrażeniu, jakie odczuwa skóra, system koncentruje się na nowych odczuciach. Tego rodzaju podejście „oparte na zdarzeniach” wymaga znacznie mniejszej mocy obliczeniowej, a zespołowi TUM udało się dostosować go do swojej zrobotyzowanej skóry, umożliwiając pokrycie całego robota bez konieczności niepraktycznej mocy obliczeniowej.
Finalnie robot H-1 jest pokryty 1260 sześciokątnymi komórkami, zapewniając w sumie ponad 13000 różnych czujników. Są one umieszczone na górnej części ciała, ramionach, nogach i podeszwach stóp. Pozwala to robotowi balansować na jednej nodze i chodzić po nierównych powierzchniach. Może również przytulić osobę bez zmiażdżenia jej, co w rzeczywistości wymaga więcej obliczeń, niż wiele osób zdaje sobie sprawę.
Czytaj też: Oto transformers Robot One, który powstał w imię ochrony środowiska
Źródło: New Atlas
