Pięćdziesiąt lat temu pierwsze ramię robota przemysłowego (zwane Unimate) złożyło proste śniadanie złożone z tostów, kawy i szampana. Choć wyglądało to na banalny wyczyn, każdy ruch został zakodowany z należytą uwagą. Nawet obecnie, pomimo ogromnego postępu technologicznego, powtórzenie tego zadania jest utrudnione ze względu na niewielką efektywność robotów w operowaniu obiektami.
Jednak w ostatnich latach naukowcy uporali się z tym problemem, tworząc ich palce z miękkich, elastycznych materiałów, takich jak guma. Ta miękkość pozwala robotom chwycić wszystko, od winogron po pudełka i puste butelki po wodzie. Wtedy nie są jednak w stanie poradzić sobie z dużymi lub ciężkimi przedmiotami. Aby zmienić tę sytuację, naukowcy opracowali chwytak, który jest zarówno delikatny jak i silny.
Czytaj też: To robotyczne ramię niezwykle precyzyjnie operuje przedmiotami
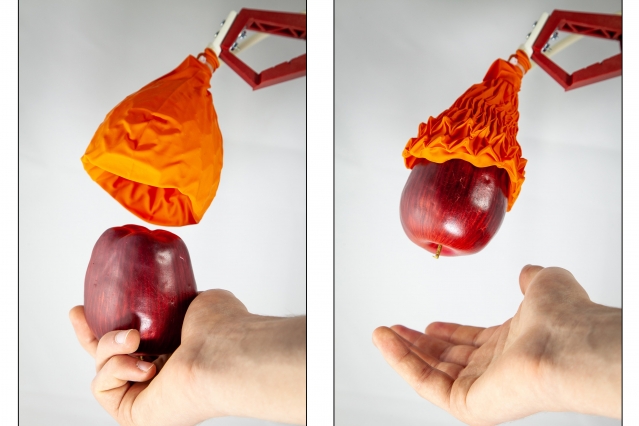
Urządzenie ma kształt stożka i zasilane na zasadzie zasysania powietrza. Aby podnieść obiekt, ramię najpierw go otacza, by potem zassać powietrze i go przesunąć. Chwytak składa się z trzech części: struktury szkieletowej opartej na origami, hermetycznej skóry otaczającej strukturę oraz łącznika Zespół wykorzystał chwytak używając standardowego robota, aby przetestować jego siłę na różnych obiektach. Urządzenie może uchwycić i podnieść przedmioty o osiągających nawet 70% jego średnicy.
Robot działa obecnie najlepiej z cylindrycznymi przedmiotami, takimi jak butelki lub puszki. Nic dziwnego, że kształt chwytaka utrudnia mu chwytanie bardziej płaskich rzeczy, jak np. kanapki lub książki.
[Źródło: news.mit.edu]
Czytaj też: Naukowcy stworzyli robotyczną nogę uczącą się chodzić
