
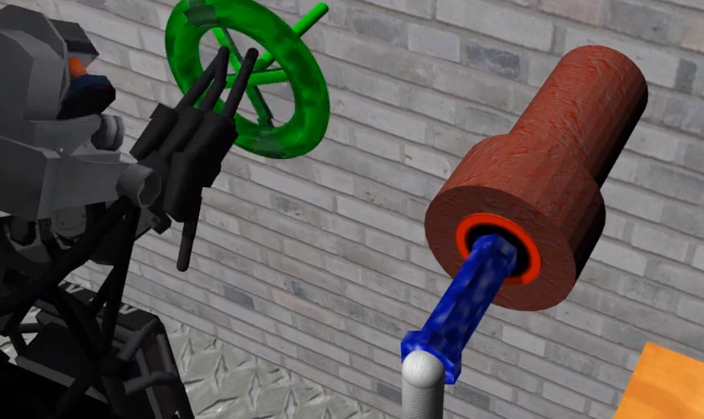
Jeszcze tylko niecały miesiąc do zorganizowanych przez DARPA zmagań robotów, których formułę i czekające na maszyny zadania pokrótce opisaliśmy tutaj. Przypomnijmy, że konkurs ma na celu wyłonienie robotów najbardziej niezawodnych i najlepiej przystosowanych do pracy w niebezpiecznych warunkach, na przykład przy wyciekach radioaktywnych. Zanim jednak roboty wejdą na realny tor przeszkód i zostaną poddane wymagającym testom, takim, jak manipulacja obiektami, prowadzenie pojazdem czy wycinanie ścian, będą musiały zmierzyć się z zadaniami w świecie wirtualnym. Organizatorzy wykorzystają do tego trójwymiarowe środowisko o nazwie Gazebo. Jest ono częścią projektu Robot Operating System (oprogramowanie open source do kontroli rozmaitych części robotów) i było w ostatnich latach finansowne przez DARPA. W konkursie posłuży do symulacji różnych warunków fizycznych, między innymi zmiennego oświetlenia, by uniknąć później nieprzewidzianych zachowań bądź kolizji, a co za tym idzie – ewentualnych uszkodzeń sprzętu.
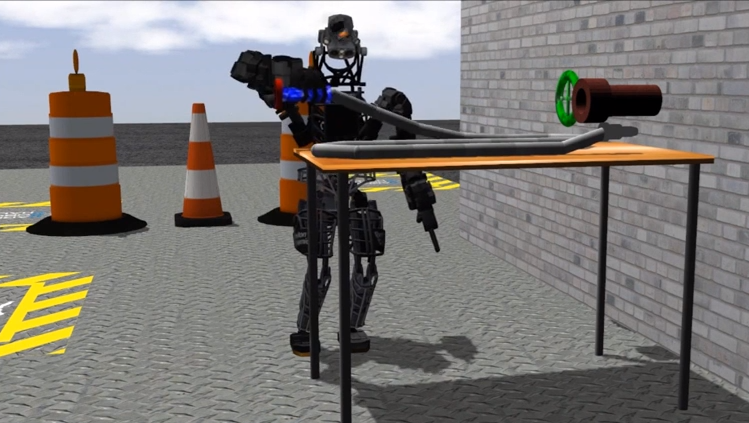
Główny inżynier z Open Soyurce Robotics Foundation, Nate Koenig, który od kilku lat jest odpowiedzialny za prowadzenie zespołu rozwijającego Gazebo, zapewnia, że jego organizacja pracuje nad jak najwierniejszym odwzorowaniem fizyki w środowisku. Tak, by uniknąć problemów przy późniejszym przejściu na sterowanie rzeczywistym robotem, który będzie musiał z tą fizyką zmierzyć się w praktyce. Wykorzystanie wirtualnego środowiska 3d do testów ma wiele zalet – przede wszystkim to tani i prosty sposób na swobodne eksperymentowanie z maszynami, przy jednoczesnym oszczędzeniu sobie ryzyka poniesienia strat w przypadku uszkodzenia kosztownego sprzętu. Symulacje da się też przeprowadzać niezależnie, dzięki temu wiele osób może równocześnie pracować nad różnymi jego częściami.
Pras Velagapudi z Carnegie Mellon University (Pennsylvania, USA), członek jednej z drużyn startujących w konkursie, jest zdania, że to ogromne ułatwienie dla każdego, kto jest zainteresowany rozpoczęciem przygody z robotyką. Dawniej trzeba było tworzyć wszystko od podstaw, nie tylko złożyć urządzenie, ale napisać do niego sterowniki, oprogramowanie, rozwiązać kwestię przeprowadzania symulacji, i być może stworzyć do tego własne narzędzia. Tę opinię podziela Brian Benoit, senior product manager z firmy Rethink Robotics. Wedle jego słów, jeśli ma się naprawdę dobry pomysł na maszynę i warunki do jej stworzenia, to ostatnią rzeczą, nad jaką chciałoby się siedzieć, to na przykład konieczność wymyślania od nowa już istniejących równań matematycznych, opisujących ruch ramion robota. Za tym stwierdzeniem stoi pewne doświadczenie; swego czasu Rethink stworzył swoją własną platformę symulacyjną w celach komercyjnych, lecz firma nie zrezygnowała z zastosowania ROS oraz Gazebo. Korzysta z nich kilka robotów przemysłowych, łatwych do zaprogramowania, przeznaczonych do pomocy przy prostych czynnościach na linii produkcyjnej. Rethink udostępnia też swojego pierwszego robota, Baxtera, w celach edukacyjnych i zachęca do eksperymentowania na nim przy użyciu Gazebo.
Trójwymiarowe środowisko ma oczywiście swoje ograniczenia. Świat rzeczywisty jest tak złożony, że ciężko uwzględnić wszystkie fizyczne niuanse w oprogramowaniu. Velagapudi przywołuje choćby trudności z precyzyjną symulacją kontaktu maszyny z podłożem.
Źródło: TechnologyReview; Zdjęcia: DARPA
