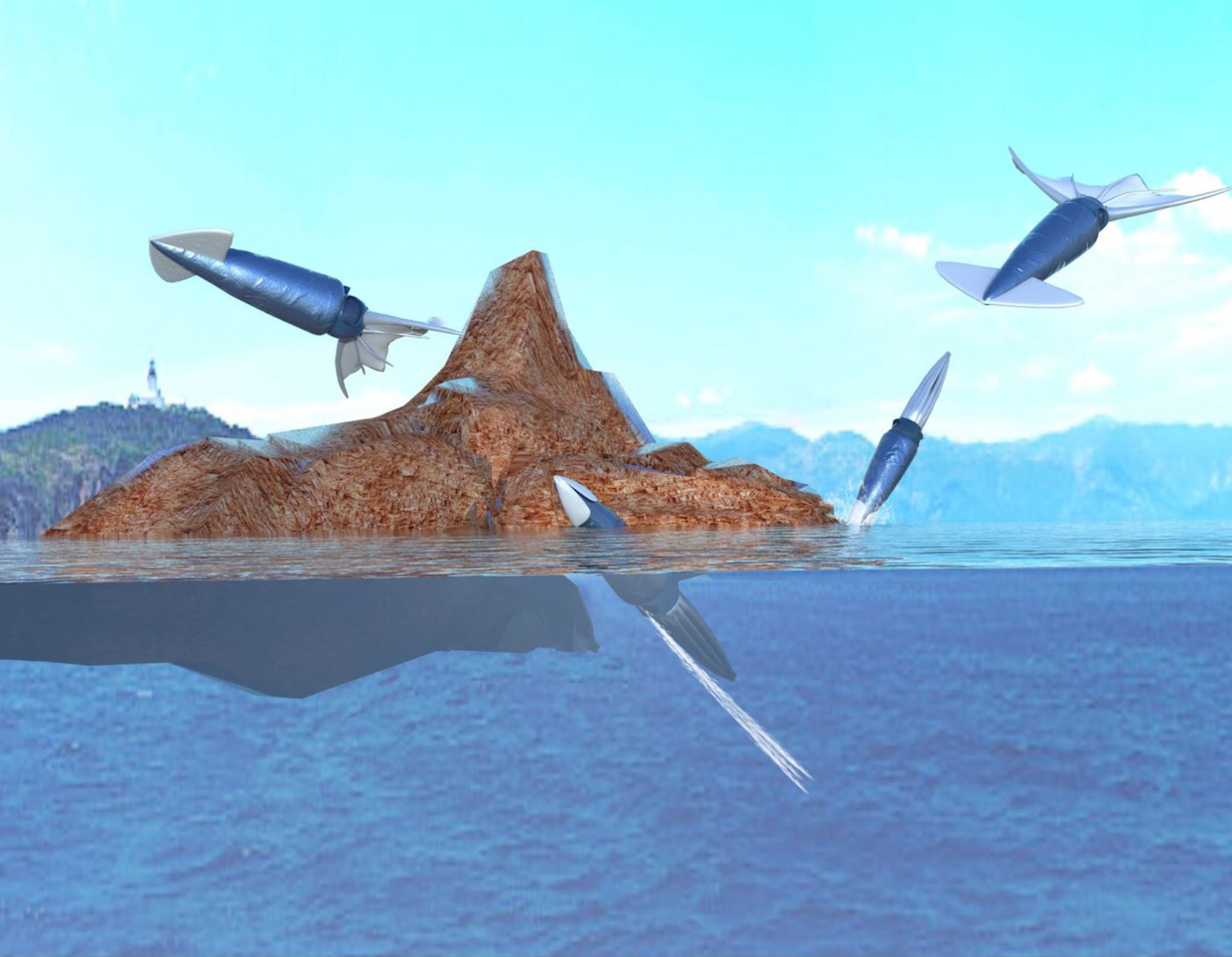
Większość podwodnych robotów wykorzystuje jeden z dwóch sposobów poruszania się: śmigła lub płetwy. Ale zwierzęta pokazały nam, że istnieje wiele innych rodzajów pływania, które mogą wykorzystywać również maszyny. Oto mechaniczna kałamarnica z napędem odrzutowym, która może wyskoczyć z wody oraz zrobotyzowana muszelka, która porusza się jak prawdziwa.
Mechaniczna kałamarnica jest zasilana głównie sprężonym powietrzem, które przechowuje w cylindrze. Płetwy i ramiona są kontrolowane przez siłowniki pneumatyczne. Gdy robot chce się poruszać pod wodą, uwalnia niewielką ilość sprężonego powietrza; zapewnia to wystarczającą siłę ciągu, aby robot wyskoczył ponad taflę wody. W efekcie pojedynczy skok może mieć nawet 10 do 20 metrów długości.
Czytaj też: Ta robotyczna ryba z krwioobiegiem przełamuje wiele barier
Z kolei w przypadku muszelki poruszanie polega na ciągłym otwieraniu i zamykaniu jej skorupy, co prowadzi do wypuszczania strumieni wody, które napędzają robota. Ponieważ urządzenie zasysa wodę, a następnie natychmiast ją wyrzuca, konstrukcja musi być odporna na zanieczyszczenia, które mogłyby stanowić spory problem w morzach i oceanach. Prototyp RoboScallop waży 65 gramów i osiąga prędkość nawet 16 centymetrów na sekundę.
Możliwości obu urządzeń możecie sprawdzić dzięki materiałom udostępnionym przez ich pomysłodawców.
[Źródło: spectrum.ieee.org]
Czytaj też: Naukowcy stworzyli robota z gałęzi, który sam nauczył się chodzić
