Zwykle manipulujące przedmiotami roboty nie są kojarzone z delikatnością, bo po prostu nie są w stanie „poczuć” swojej siły w robotycznych palcach, a określenie kruchości danych przedmiotów też nie jest ich mocną stroną. Jednak ujawniony niedawno robot Kinder od naukowców z Uniwersytetu w Buffalo radzi sobie w tej kwestii całkiem nieźle.
Czytaj też: Opracowano technologię wspomagającą dla protez dłoni
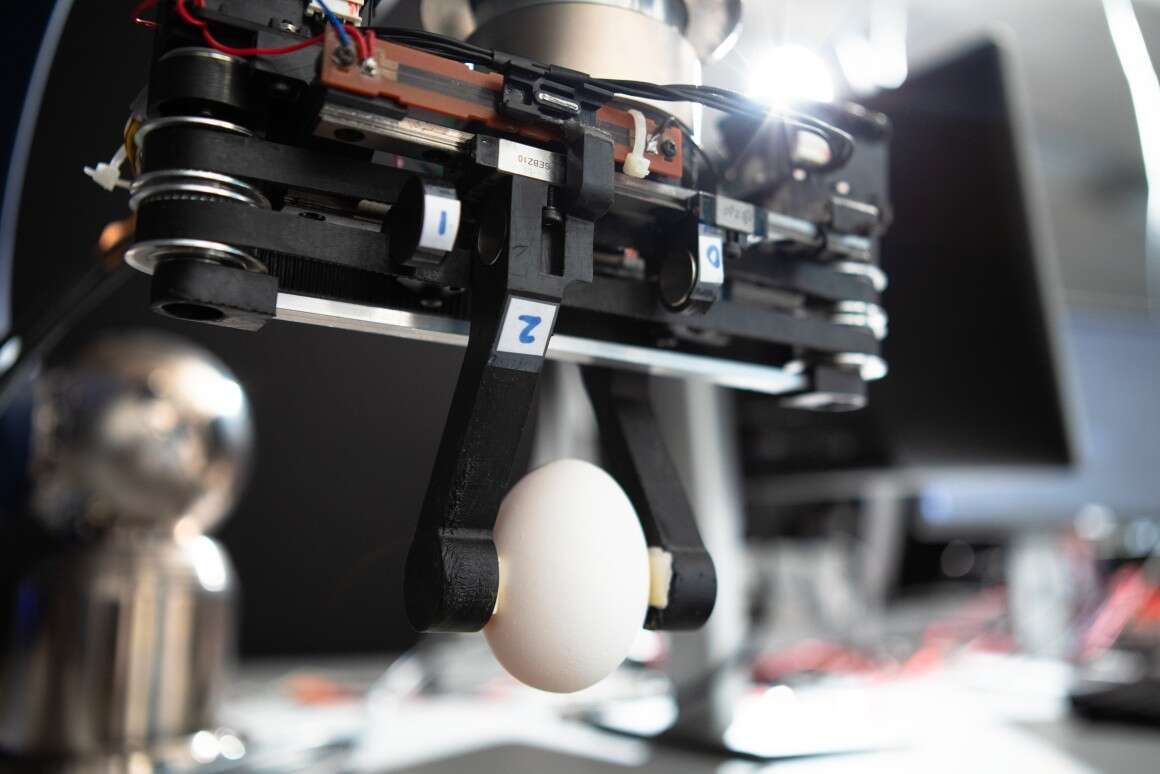
Robot utworzony przez zespół z dr hab. Ehsan Esfahani na czele zachwyca zwłaszcza nowym eksperymentalnym „chwytakiem”. Ten posiada dwa zmotoryzowane palce, które przesuwają się ”do siebie” lub ”od siebie” wzdłuż toru. Każdy palec jest zamontowany na podstawie magnetycznej, która z kolei znajduje się między dwoma „odpychającymi” magnesami neodymowymi. Żaden magnes w rzeczywistości nie dotyka podstawy, więc między każdą stroną podstawy a odpowiadającym jej magnesem jest szczelina powietrzna – ta szczelina działa jak sprężyna amortyzująca.
Kiedy dwa palce zbliżają się do siebie, aby chwycić przedmiot między nimi, magnesy po obu stronach każdego z nich siedzą stosunkowo blisko podstawy, przytrzymując palec mocno w miejscu. Przy tym niewielka szczelina powietrzna sprawia, że kruche materiały są w pewnym stopniu chronione przed zmotoryzowaną siłą. Nawet przy czynnikach zewnętrznych, bo kiedy zintegrowany czujnik wykryje uderzenie np. w przeszkodę, zaczyna manipulować magnesami. Technologia jest obecnie sprzedawana do użytku z robotycznymi ramionami innych firm.
Czytaj też: Opracowano filament z wielomateriałowych włókien do drukarek 3D
Źródło: New Atlas
