Zabieg odbył się w Szwecji z udziałem pacjenta po amputacji ręki. Opracowana w Chalmers University technologia to implant nerwowo-mięśniowy zaprojektowany i zbudowany w celu kontrolowania protezy ręki.
Aby dopasować implant, wymagana była zaawansowana operacja, polegająca na dopasowaniu implantów tytanowych umieszczonych w dwóch kościach przedramienia (promieniowa i łokciowa). Następnie elektrody dopasowano do nerwów i mięśni, a te zostały rozszerzone, aby wyodrębnić sygnały przeznaczone do kontrolowania robotycznej ręki i umożliwienia odczuwania wrażeń dotykowych. Implant to pierwsza na świecie operacyjna, dokładna i czuła ręka, którą można wykorzystać w „prawdziwym życiu”.
Czytaj też: Proteza nogi ze wspomaganiem SI pomoże osobom po amputacji
W nowej odsłonie opisywana technologia rozwiązuje problem powszechny w przypadku konwencjonalnych protez. Wymagają one bowiem umieszczenia elektrod na skórze w celu wydobycia sygnałów z leżących mięśni kikuta. Takie elektrody mogą dostarczać jedynie ograniczone sygnały i umożliwiają użytkownikowi kontrolowanie kilku prostych operacji, takich jak otwieranie i zamykanie ręki. Naukowcy byli w stanie zwiększyć zakres ruchów poprzez wszczepienie elektrod do całego mięśnia. W tym celu potrzebnych było szesnaście elektrod, a czynności po operacji wykazały, w jaki sposób można uzyskać lepszą kontrolę.
Kolejnym ulepszeniem było podłączenie elektrod do utraconych czujników biologicznych ręki, co pozwoliło naukowcom elektrycznie stymulować poszczególne nerwy w ten sam sposób. Pacjent przechodzi obecnie rehabilitację, aby odzyskać siłę w przedramionach, dzięki czemu będzie mogła nosić protezę ręki. Ponadto pracuje nad tym, jak kontrolować ją za pomocą wirtualnej rzeczywistości.
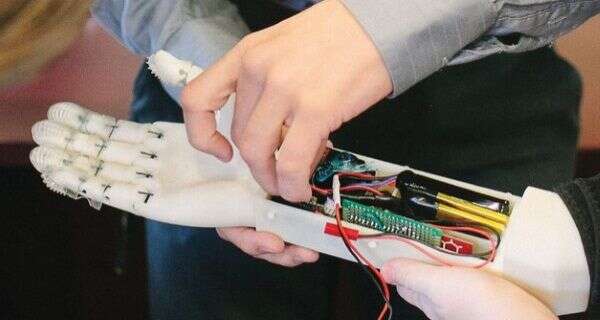
[Źródło: digitaljournal.com; grafika: Limbitless Solutions]
Czytaj też: Platforma Nerve-on-a-Chip może być przyszłością neuroprotetyki
