Już pisaliśmy Wam o zespole robotów, który radzi sobie świetnie z przygotowywaniem amunicji do recyklingu, ale teraz wchodzimy na jeszcze bardziej niebezpieczny teren, bo z udziałem potęgi atomu. Inżynierowie z uniwersytetu w Lancaster zajmują się obecnie opracowaniem półautonomicznego robota, który zajmowałby się demontażem wycofanych z eksploatacji reaktorów jądrowych. Wiecie, bo raczej nikt nie chce być za blisko tego ustrojstwa.
Czytaj też: Bojowy robot THeMIS przenosi wojnę na zupełnie nowy poziom
Likwidacja reaktora jądrowego to długa i kosztowna praca, która wymaga bardzo wysokiego poziomu umiejętności. Niestety, jest to również zadanie, które należy wykonać w wysoce radioaktywnym środowisku skażonym wszystkimi poziomami odpadów nuklearnych. Stawia to pracowników w pozycji nie do pozazdroszczenia. Jak twierdzi jeden z inżynierów:
Standardem w likwidacji elektrowni jądrowych jest bezpośrednie zdalne sterowanie robotami przez człowieka, co jest niezwykle trudne dla operatorów. Zwłaszcza biorąc pod uwagę złożoność zadań likwidacji elektrowni jądrowych. Jest mało prawdopodobne, aby w pełni autonomiczne rozwiązania zostały uznane za bezpieczne w najbliższej przyszłości, dlatego zbadaliśmy stworzenie pół-autonomicznego rozwiązania.
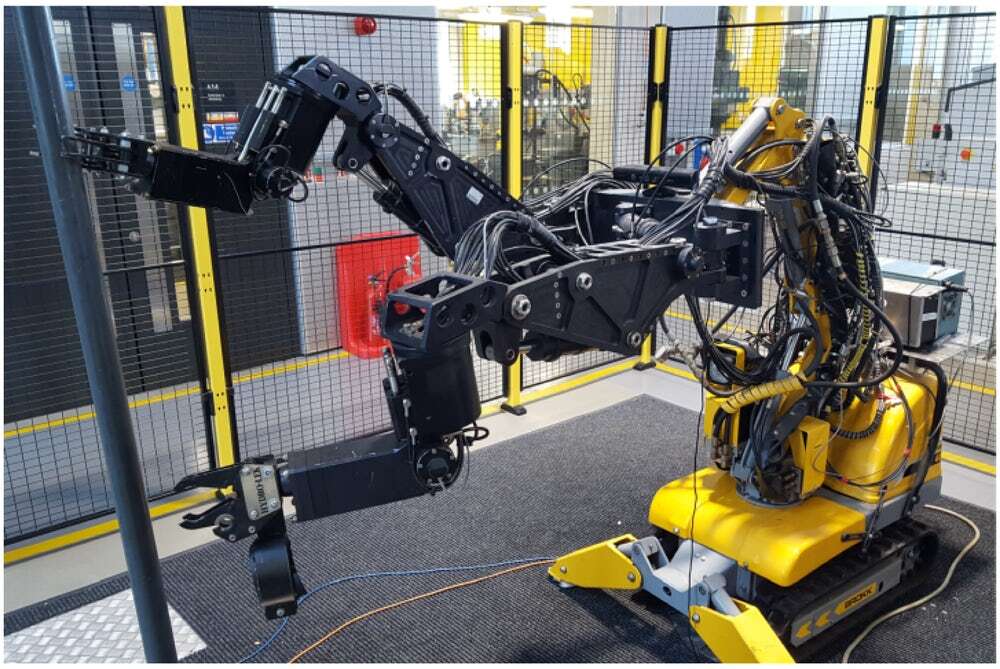
Prototypowy robot ma napędzane hydraulicznie ramiona i manipulatory z kamerą zapewniającą informacje wizualne. Kamera nie jest jednak zwykłym urządzeniem, bo zapewnia komputerowi obrazy do analizy, zapewniając identyfikację obiektów i wypracowanie sposobu ich chwytania, manipulowania i cięcia. Zamiast konwencjonalnego sterowania joystickiem operator wskazuje żądany obiekt na ekranie, a robot obsługuje resztę.
Ponieważ system ma być wykorzystywany przez operatorów bez konieczności szeroko zakrojonych szkoleń, projekt pracuje również nad tym, jak wyposażyć robota w wiele czujników. Mowa o tych, które zapewniałyby bodźce dźwiękowe i termiczne. Obecnie w celu usprawnienia robota, inżynierowie muszą postarać się o jej lepsze osłonięcie przed promieniowaniem.
Czytaj też: Irony Man stawia kolejny krok w kierunku naturalnej interakcji z robotami
Źródło: New Atlas
