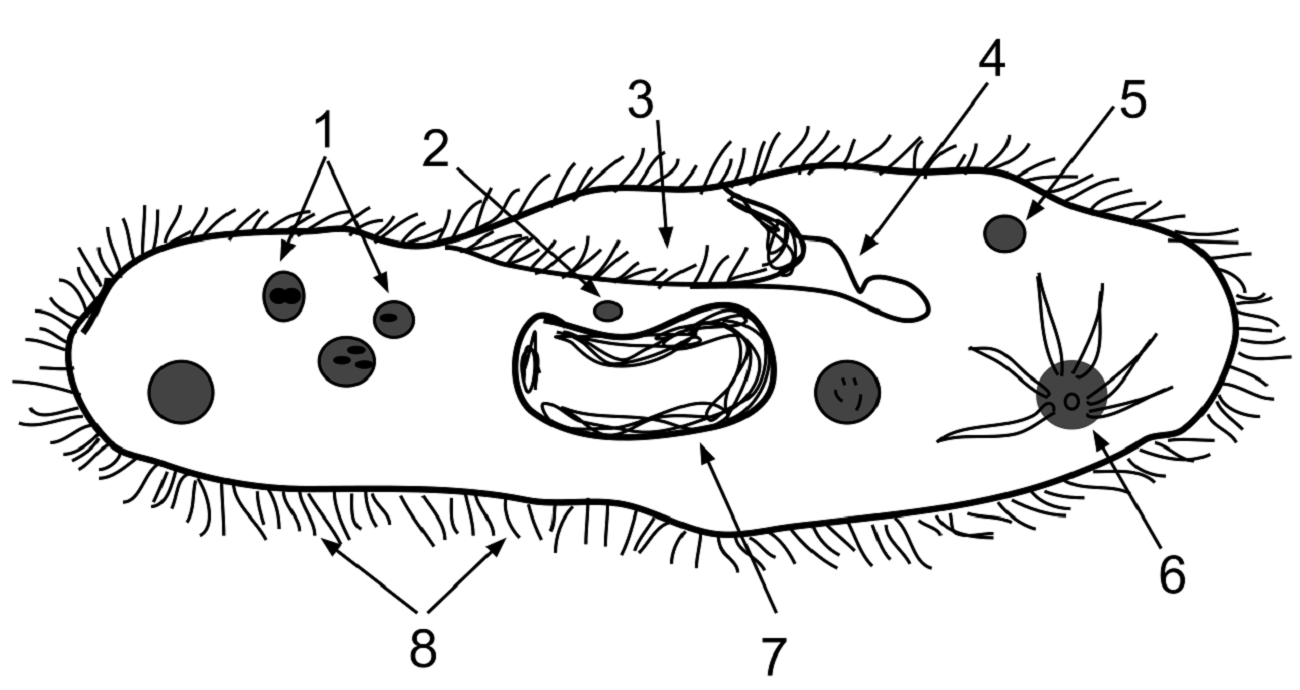
Pantofelki i inne mikroby poruszają się w cieczy za sprawą włosków zwanych rzęskami. Naukowcy opracowali nowy rodzaj syntetycznych rzęsek, które mogłyby umożliwić funkcjonowanie miniaturowych robotów.
Naukowcy już wcześniej tworzyli sztuczne rzęski, ale zazwyczaj były one dość skomplikowane pod względem konstrukcji i na tyle duże, iż nie dało się ich zamontować na naprawdę małych robotach. Zespół badawczy z Uniwersytetu Technicznego w Eindhoven postanowił jednak dokonać przełomu. W ten sposób powstał nanorobot o miękkim ciele, który jest napędzany w podobny sposób jak pantofelki.
Czytaj też: Roboty z naturalnymi mięśniami na celowniku Armii USA
Ustalenia w tej sprawie zostały opisane na łamach ACS Applied Materials & Interfaces i sugerują, że naukowcy połączyli płynny polimer z cząsteczkami żelaza karbonylowego, by następnie umieścić tę mieszaninę w układzie złożonym z cylindrycznych otworów o szerokości 50 mikrometrów. Zostały one wykorzystane w formie swego rodzaju form do „odlewu” rzęsek.
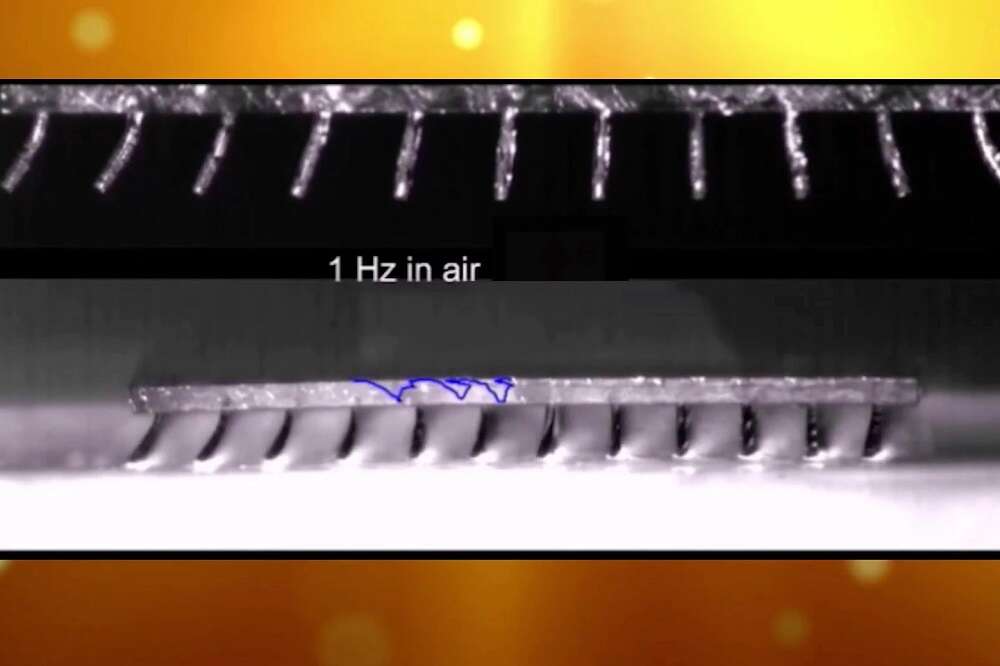
Utwardzony polimer przybrał gumową konsystencję, a magnesy umieszczone pod formami spowodowały, że cząsteczki żelaza w sąsiadujących ze sobą rzęskach ułożyły się w odmienny sposób. Dzięki temu każda rzęska miała inne właściwości magnetyczne. W ostatecznej formie powstał robot o długości 4 milimetrów oparty na polimerowej podstawie i posiadający rzęski wystające z jednej strony.
Nanorobot wykorzystujący sztuczne rzęski ma zaledwie 4 milimetry długości
Po umieszczono go z rzęskami skierowanymi ku górze w roztworze wody z glikolem i zastosowaniu pola magnetycznego doprowadziło to do wykonywania ruchów rzęsek w przód i w tył. Działanie robota przypominało wtedy funkcjonowanie pompy, ponieważ ruchome rzęski powodowały gwałtowny przepływ cieczy. Z kolei umieszczenie robota do góry nogami powodowało, że poruszał się on zarówno po płaskich jak i stromych powierzchniach.
Czytaj też: W tej restauracji kelnerzy zostali zastąpieni przez roboty
Maszyna była w stanie pokonać wniesienie o nachyleniu 45 stopni i unieść przedmiot ważący 10 razy więcej niż wynosi jej masa. W jaki sposób można by wykorzystać takiego nanorobota? Choćby do działania systemów mikroprzepływowych oraz przy produkcji miękkich mikrorobotów używanych do dostarczania leków lub wykonywania pomiarów wewnątrz ciał pacjentów.
