Manipulowanie obiektami przy pomocy dłoni to jedna z umiejętności, które są powszechne wśród ludzi, jednak sprawiają ogromną trudność robotom. Z biegiem czasu sytuacja powinna ulec zmianie. Maszyny wykorzystują bowiem sztuczną inteligencję do uczenia się tej sztuki. Niestety obecnie tego typu rozwiązania są dość kosztowne, lecz naukowcy z Uniwersytetu Yale opracowali tańszą alternatywę.
Ludzkie palce są zbudowane z kości otoczonych tkanką mięśniową pokrytą skórą. Takie połączenie umożliwia nam podnoszenie ciężkich przedmiotów, ale jednocześnie manipulowanie nimi, np. obracanie czy pocieranie. Aby odwzorować takie zachowanie u maszyn autorzy projektu opracowali palce o zmiennym współczynniku tarcia.
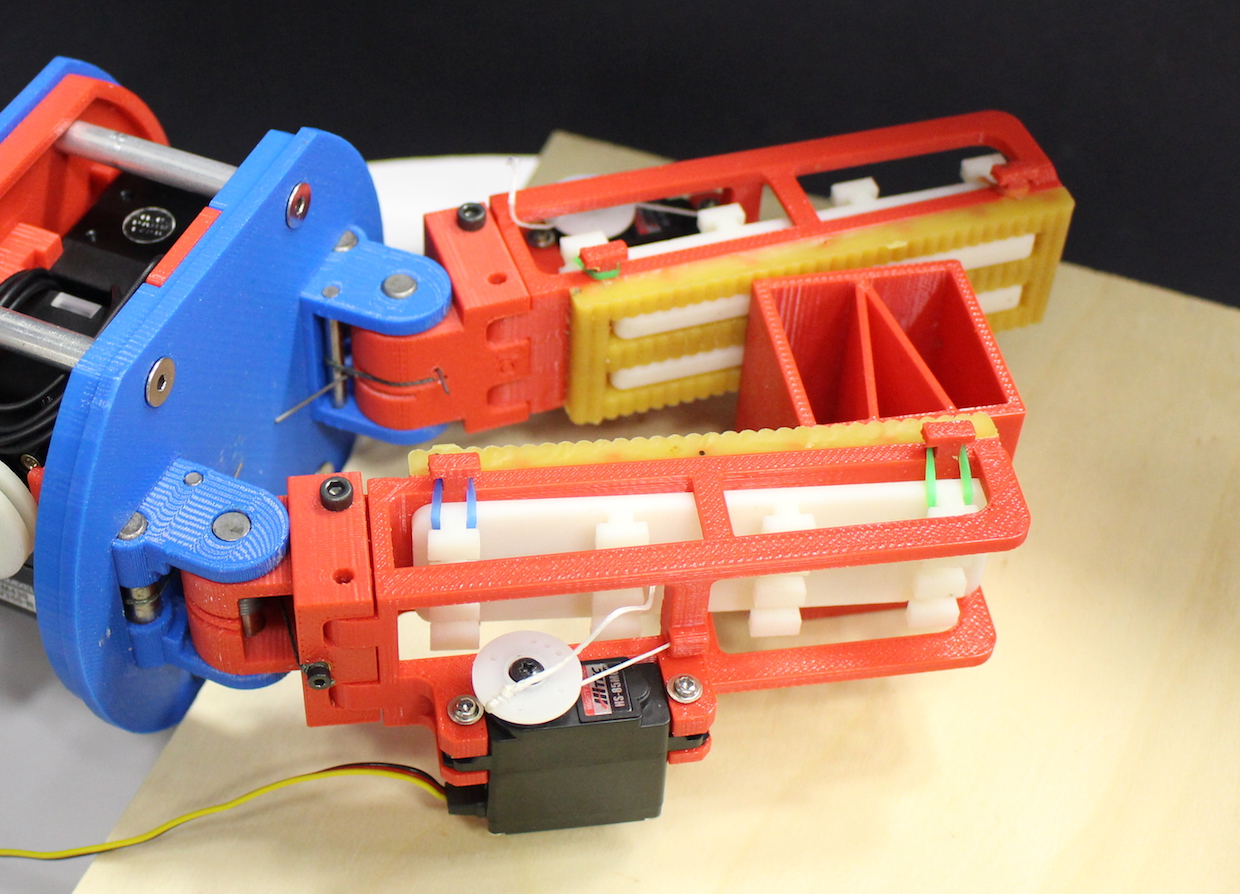
Cały system jest dość prosty, jednak na tyle sprytnie zaprojektowany, że nie można mu odmówić efektywności. Większa część palców jest drukowana 3D, a w czasie działania są one przełączane między opcją przenoszenia przedmiotów bądź ich obracania. Twórcy przyznają, że przy większym budżecie oraz zasobach komputerowych dałoby się utworzyć bardziej zaawansowany kontroler. Wtedy chwytak byłby w stanie osiągnąć niemal dowolne położenie manipulowanego obiektu.
Obecnie projekt opiera się na układzie otwartym, jednak wkrótce ma on zostać zamieniony na układ zamknięty. Pozwoli to zwiększyć przydatność chwytaka oraz łączyć go z innymi tego typu urządzeniami. Jeśli projekt się rozwinie to w przyszłości robot naśladujący ruch ludzkich palców mógłby znaleźć zastosowanie w kilku dziedzinach. Za jedną z nich uznaje się protetykę, czyli tworzenie protez kończyn.
[Źródło: spectrum.ieee.org; grafika: Yale Grab Lab]
