Przywykliśmy do tego, że to natura inspiruje inżynierów oraz naukowców do nowych, skutecznych i przydatnych rozwiązań, ale zabawki?
Zabijcie mnie, ale dawałem z siebie wszystko, a i tak nie byłem w stanie znaleźć „oficjalnej” nazwy na tę zabawkę. Śmiało więc możecie pomóc mi w komentarzach poniżej, posiłkując się tylko samym opisem. Tak więc, zespół z Harvard University wykorzystał mechanizm rodem z tych prostych „zabawek”, które wyskakiwały w powietrze pod wpływem nacisku naszego palca. Uznajmy, że to „skoczki” – w angielskim określa je miano „poppers”.
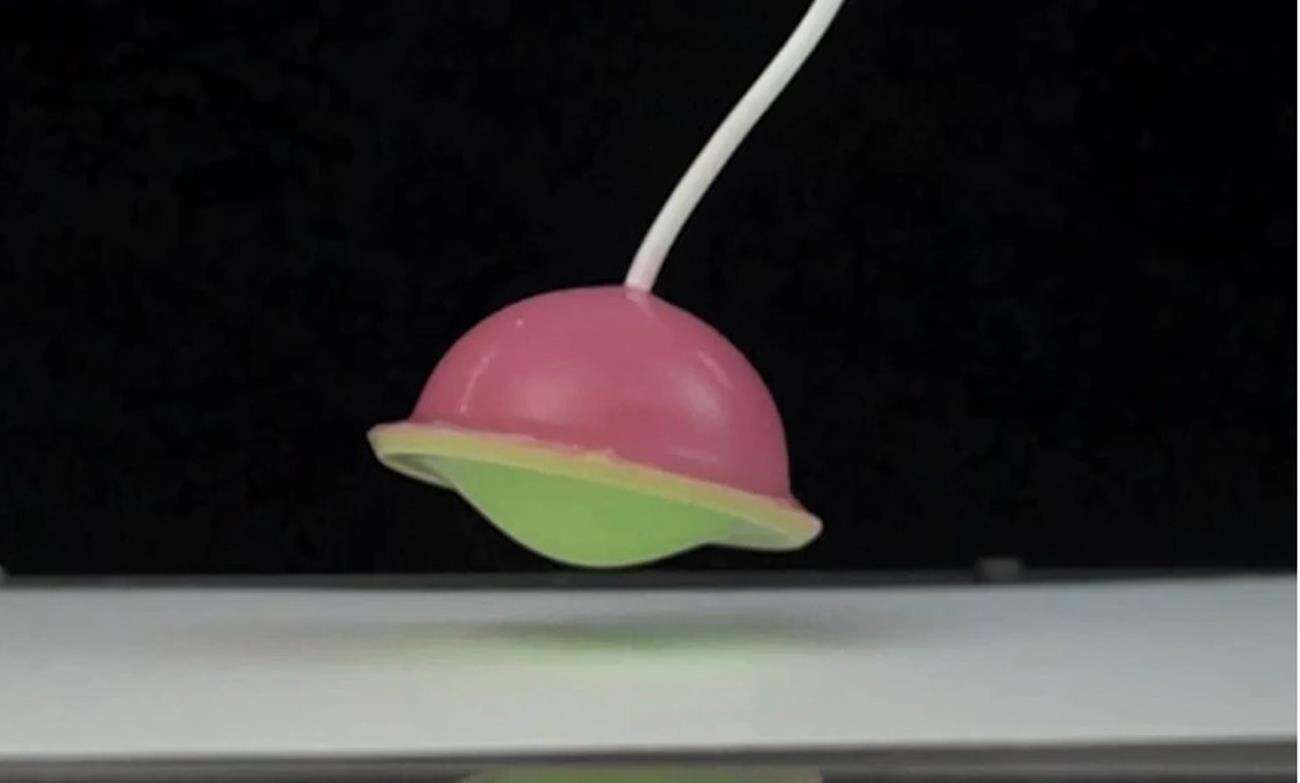
Tak czy inaczej, nasze skoczki zainspirowały mechanizm, który umożliwił miękkiemu robotowi skakać po nierównym terenie. Obecnie mechanizm sprowadza się do siłownika złożonego z dwóch polimerowych kapsli odwróconych w dół. Większy z nich stanowi oparcie dla tego mniejszego w środku (połączenie zrealizowano na krawędziach), a między nimi jest niewielka szczelina powietrzna.
Kiedy nie jest potrzebny, siłownik po prostu płasko opiera się o ziemię, ale kiedy nadchodzi moment na skok, zintegrowany wężyk pompuje do szczeliny powietrze. Wzrost ciśnienia powoduje, że górna, większa nasadka rozszerza się w górę, a mniejsza jednocześnie rozszerza w dół, uwalniając szybko energię, kiedy przechodzi z kształtu wklęsłego do wypukłego. Proces ten nazywany jest wyboczeniem skorupy i powoduje, że nasadka uderza siłą o ziemię, wyrzucając całość w powietrze.
Czytaj też: Sieć 5G w całej okazałości. Nokia rozpędziła ją do prawie 5 Gb/s
Po zakończeniu skoku ciśnienie powietrza zostaje zwolnione, a nasadka wskakuje z powrotem do siłownika. W ten sposób robot wyposażony w takie urządzenie może wielokrotnie skakać (via New Atlas).
Chcesz być na bieżąco z WhatNext? Śledź nas w Google News
